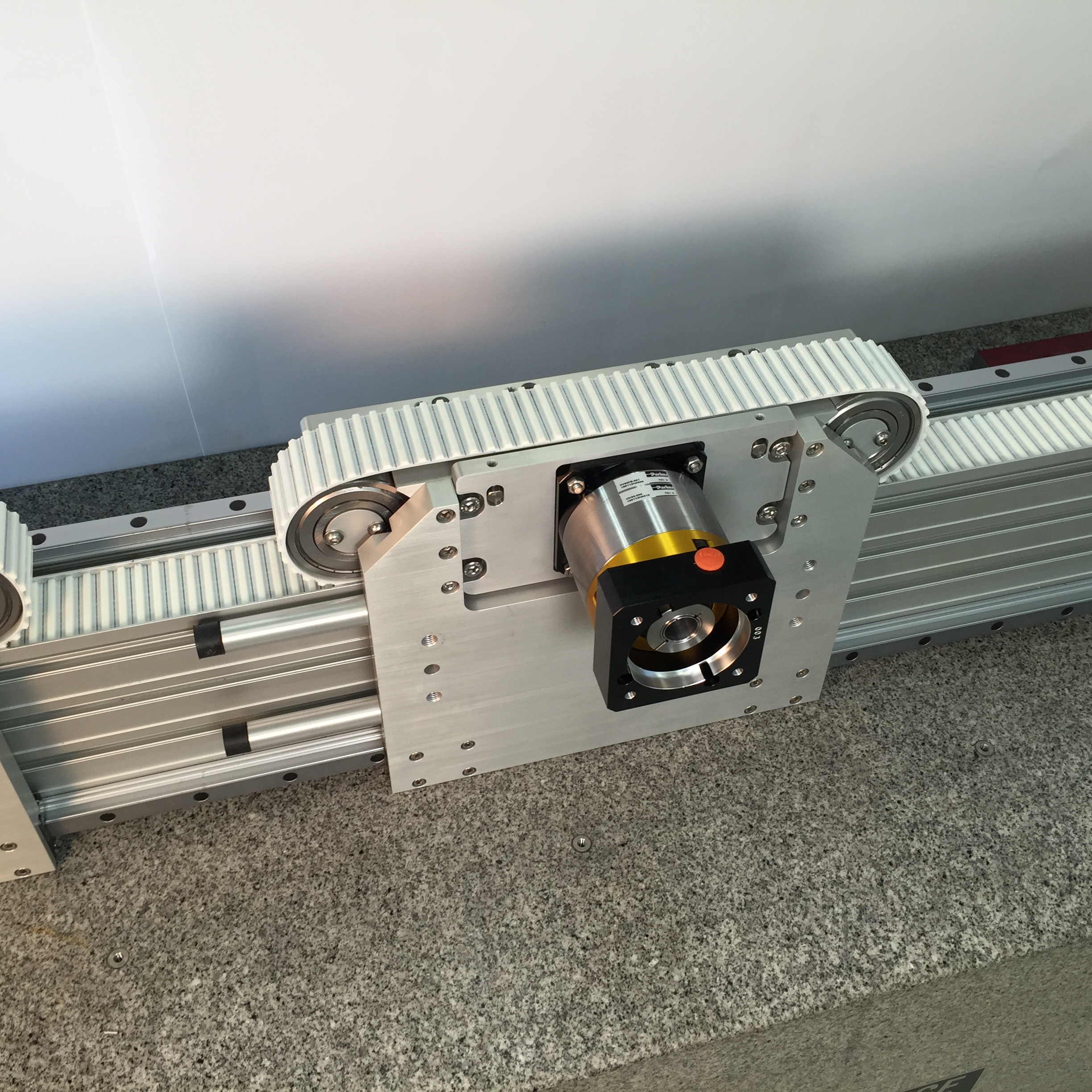
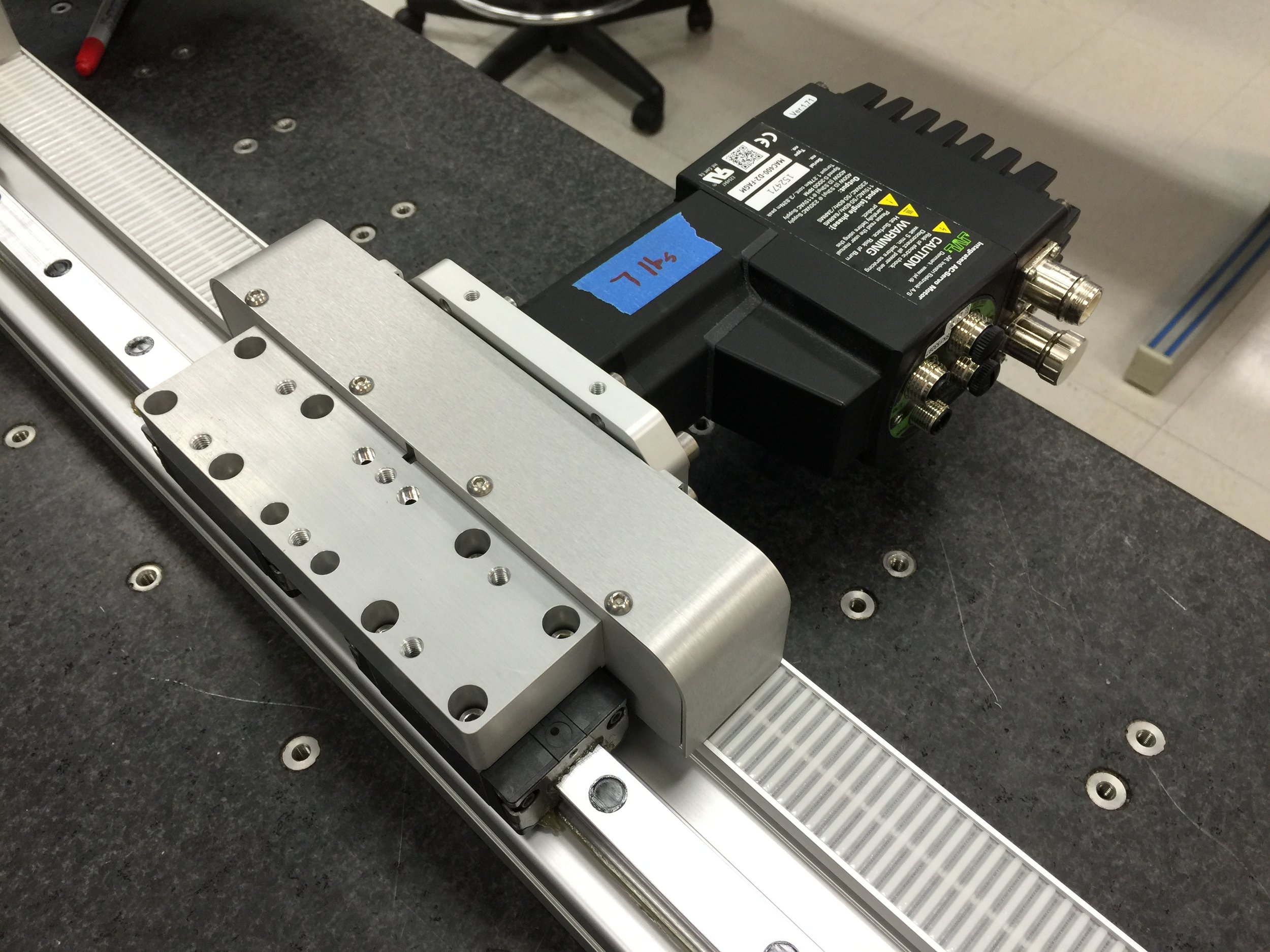
This is a ServoBelt test where the inertia mismatch between payload and motor was 200:1. For those that may not know, the normal rule of thumb is to keep this mismatch under 20:1 or so. It's a common rule that is no longer relevant with the advent of high resolution encoders, high servo update rates, and the fine current control of modern amps. The Teknic amp that is driving this brings some special additional mojo to it, too.
Upshot is that this move is settling in position within 2 encoder counts in 30msec with the smallest motor we'll put on these things. Hatcha cha! Cool stuff.
You can't do this with a conventional belt drive. Too springy. At least, not practically. Mode shaping at the control end could do it for a specific move.