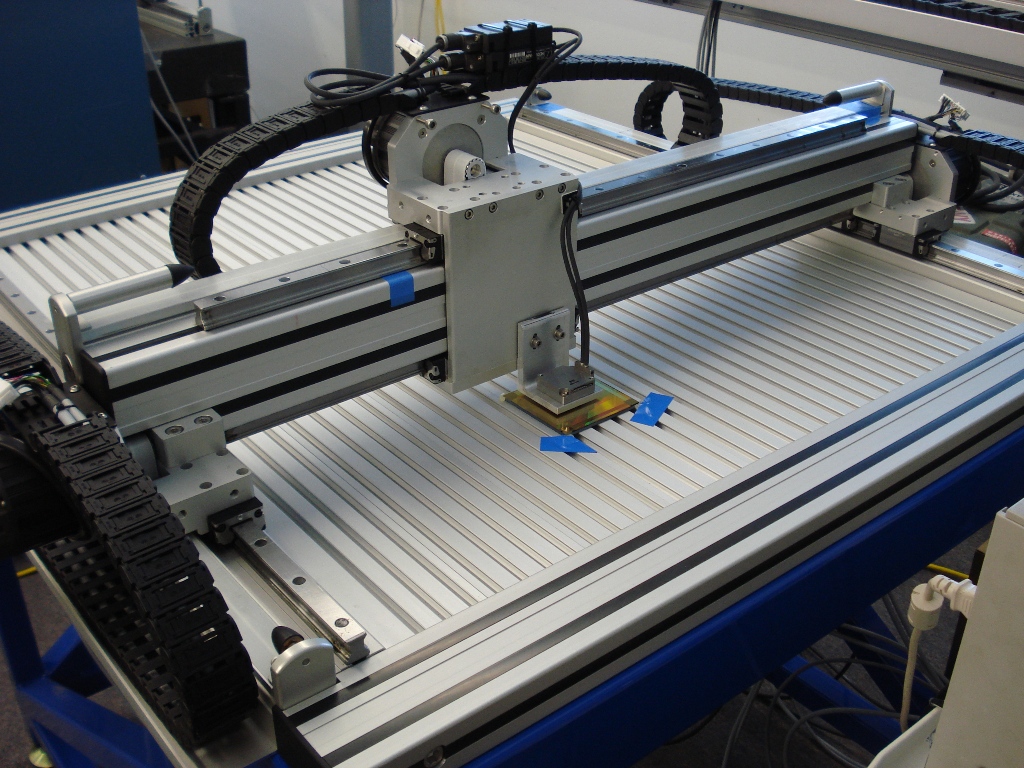
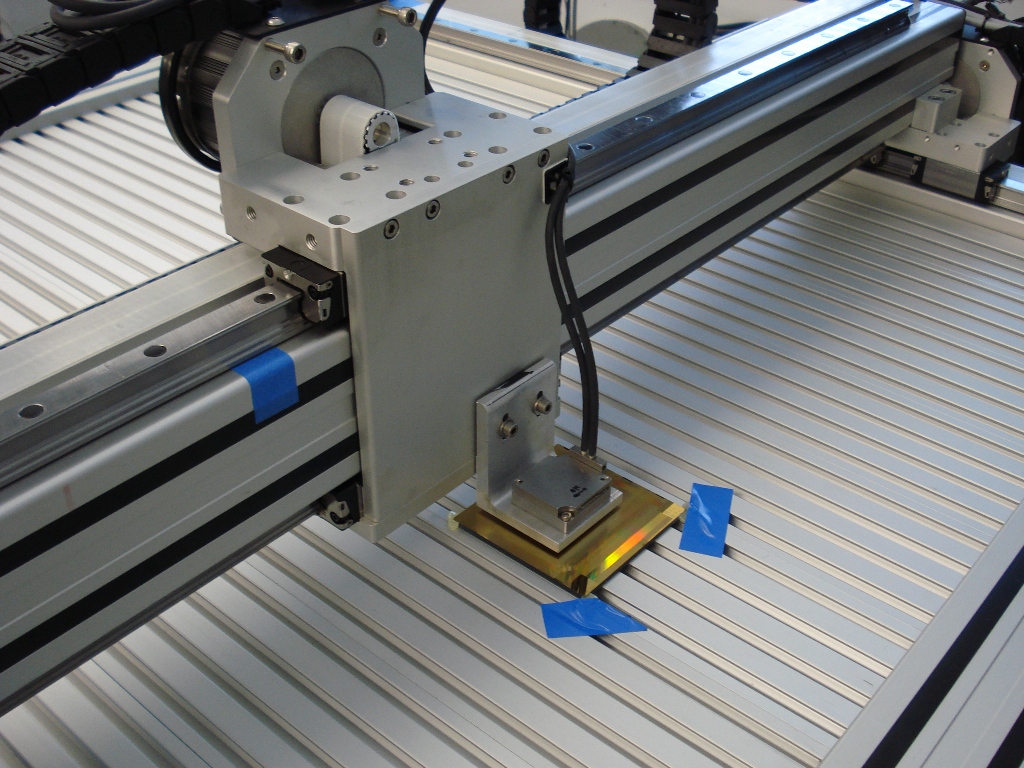
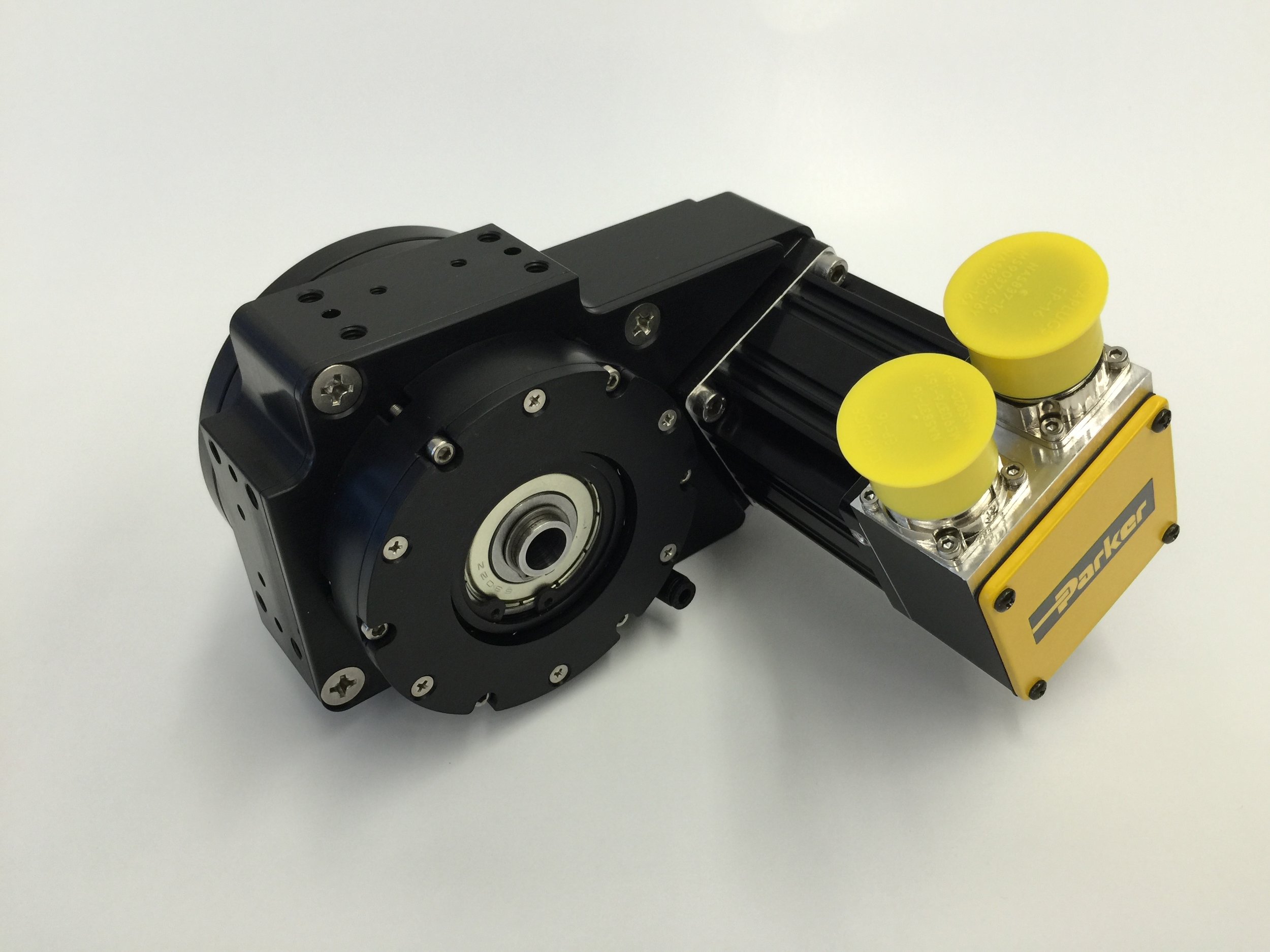
The mini CNC is coming along very nicely. Friday was first light, and over the coming weeks, the forward and inverse kinematics will be fine tuned. Our goal is to be taking XYZ moves coming in, and process into the ABZ polar coordinate system. The spindles shown are not the final ones, however, as these have been discontinued by NSK. The search continues for an inexpensive air driven spindle of greater than 150krpm.

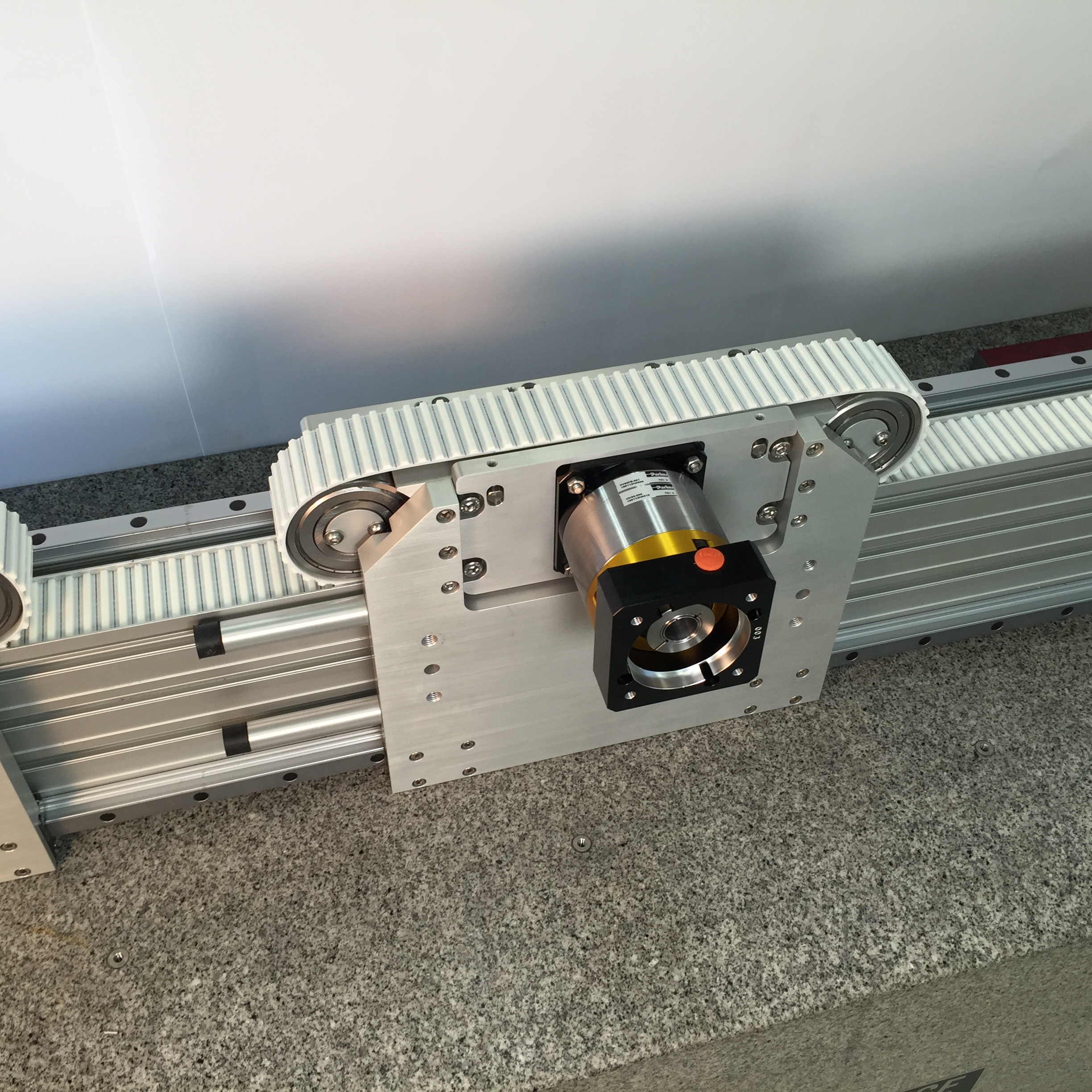
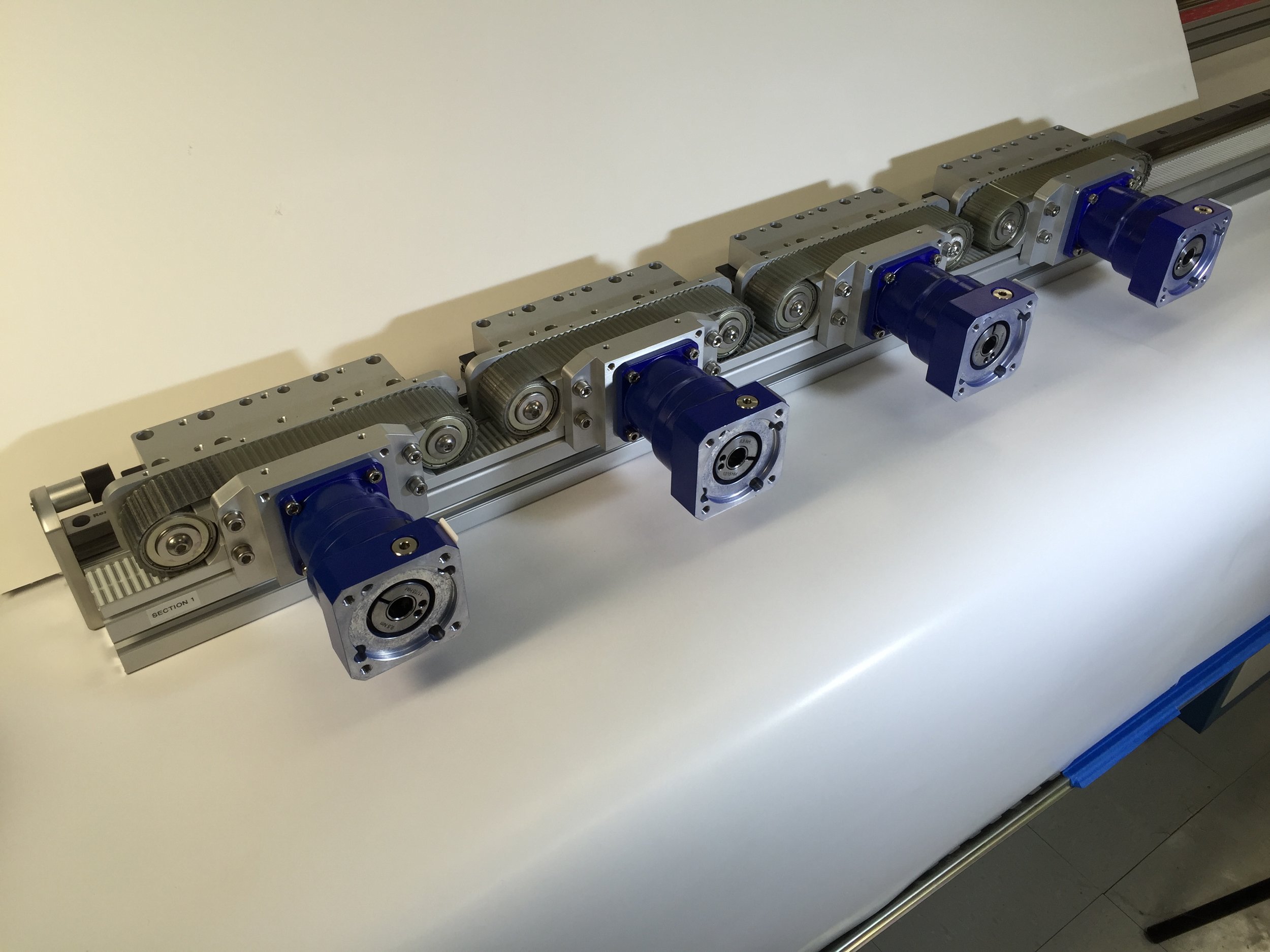
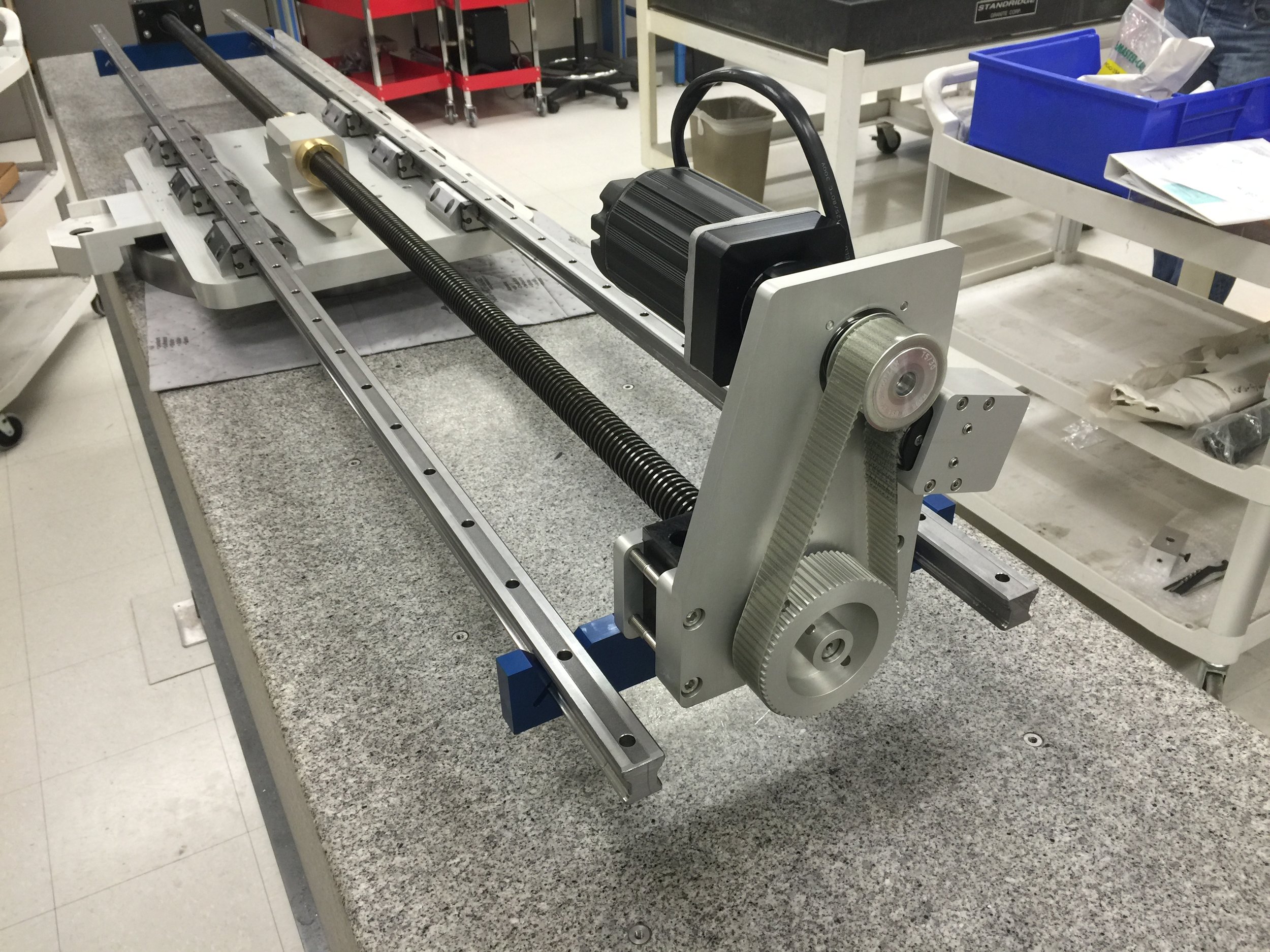
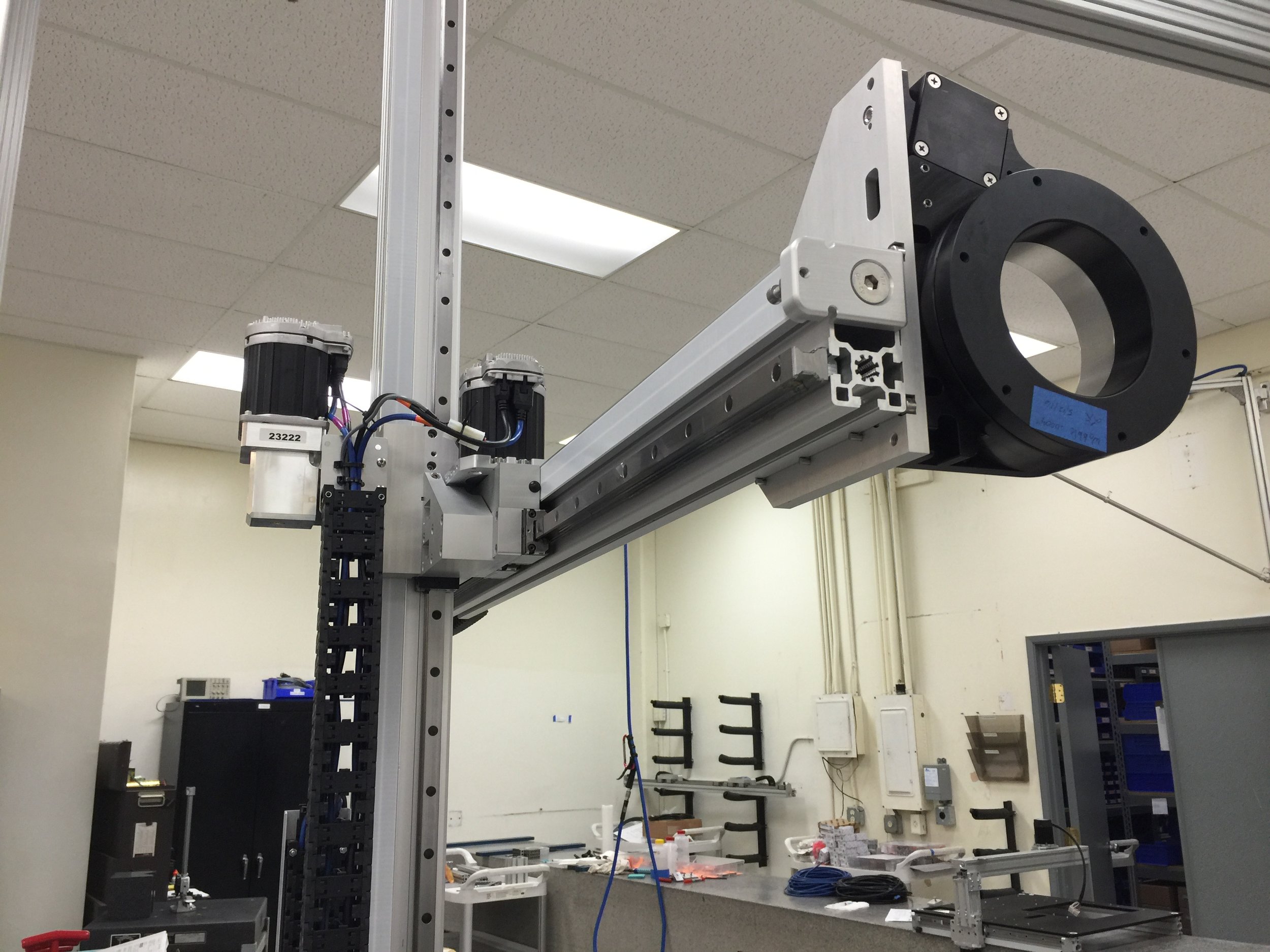
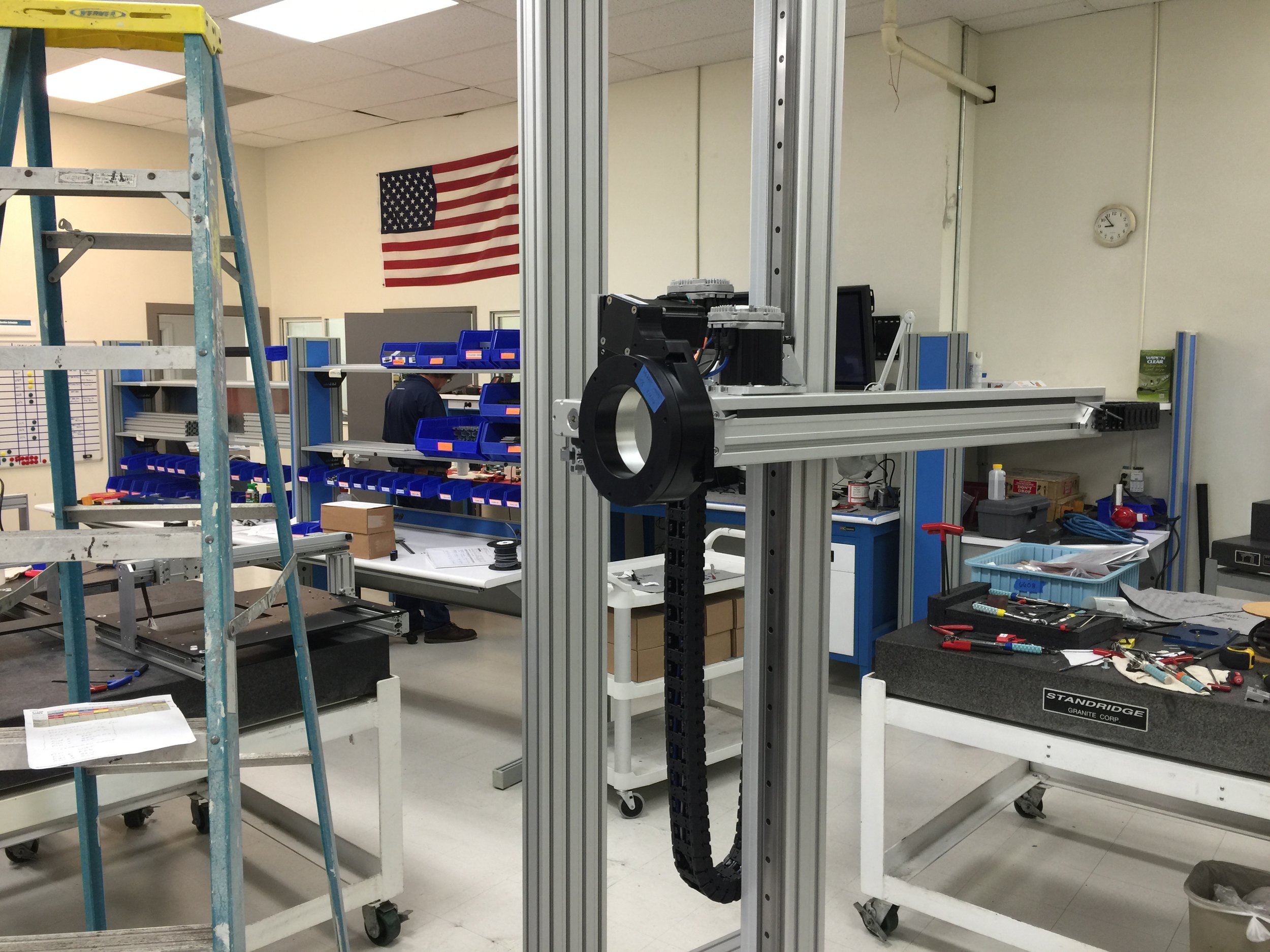
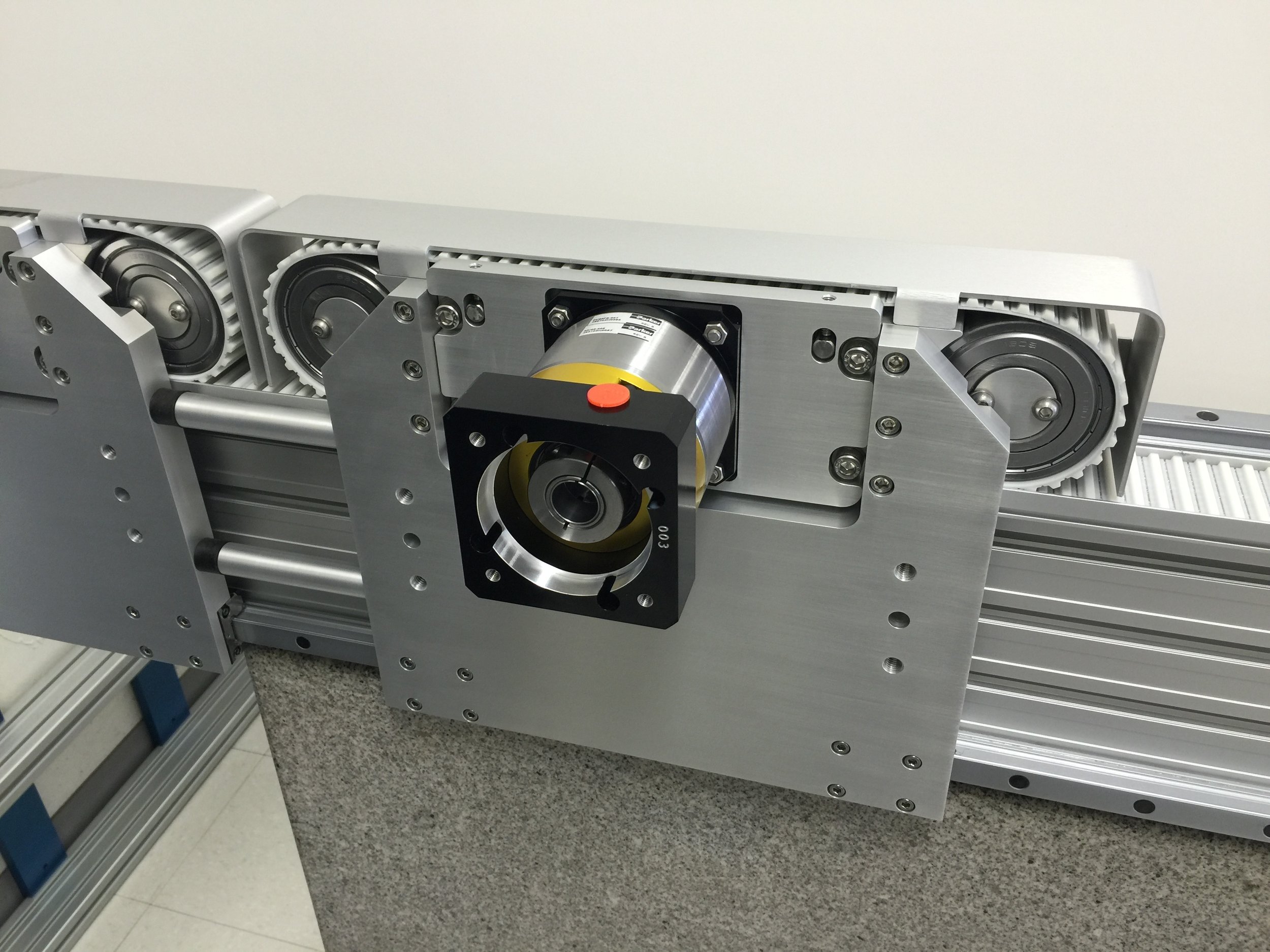
Very Nice ServoBelt gantry bridge during burn in
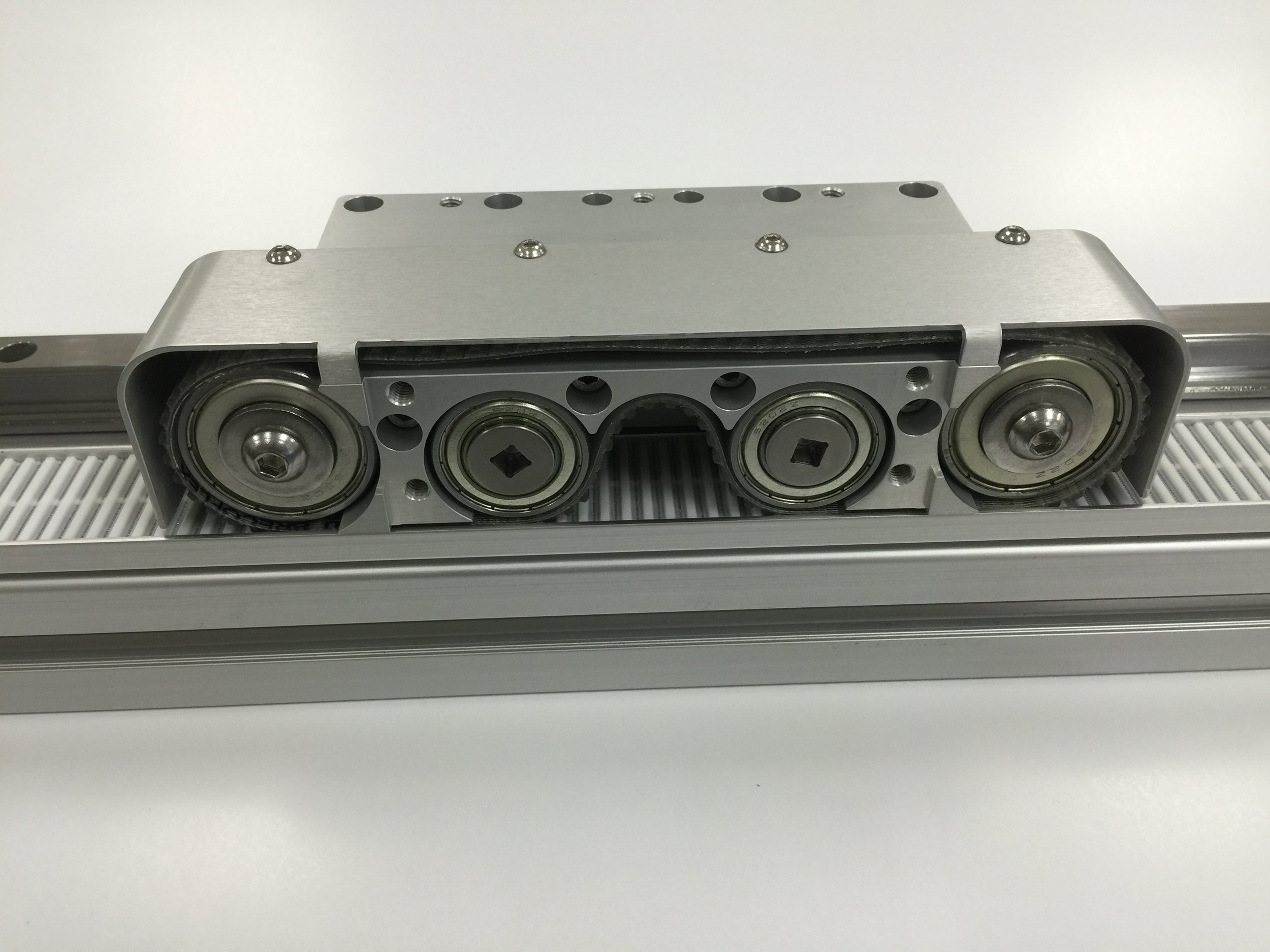
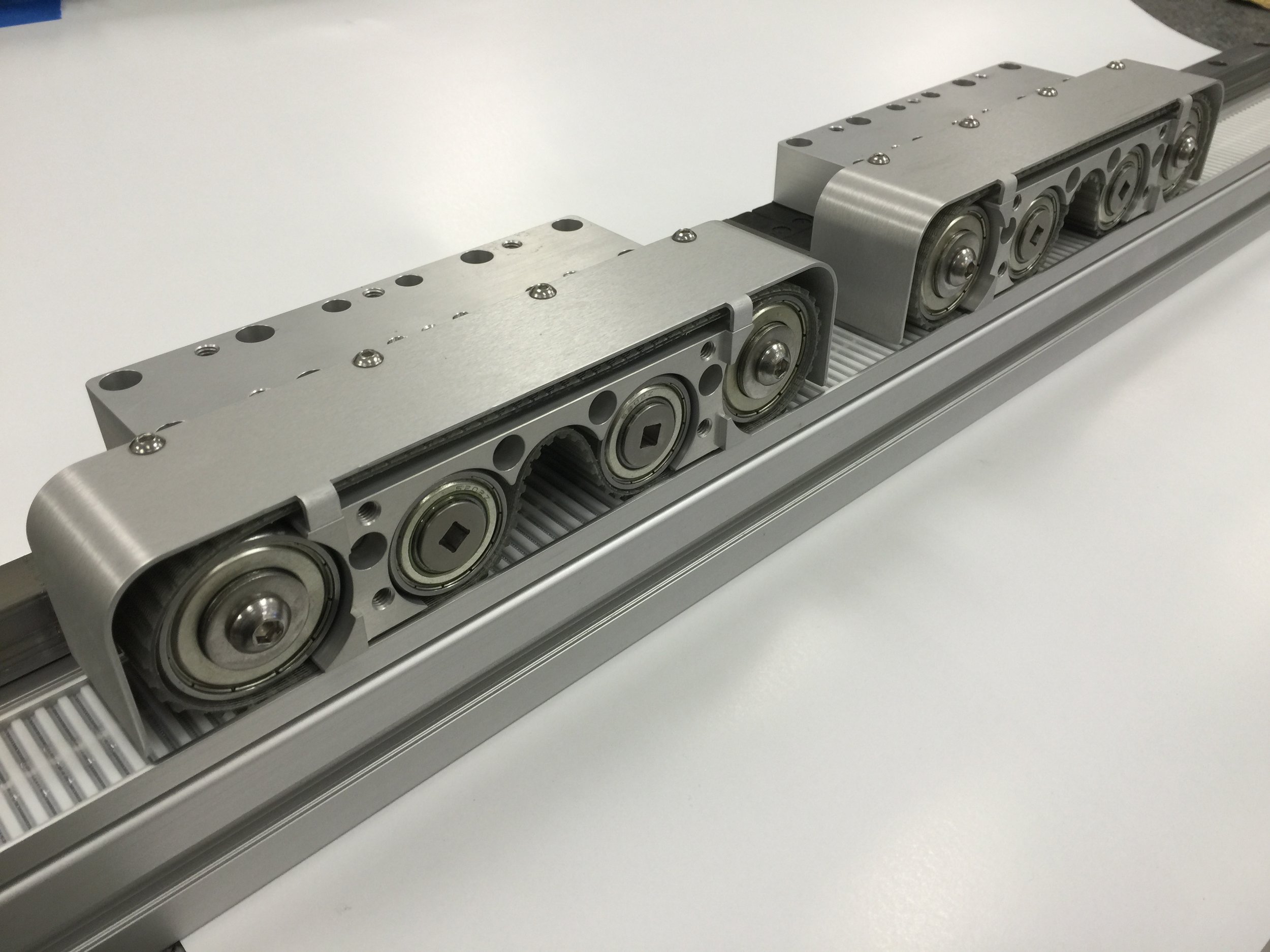
This ServoBelt is a variant that has the bearing rails attached on adjacent faces of the Bosch extrusion. It is adjusted to track a straight line in the Y-axis to within +/-.0002" when up on edge, used as the bridge in a gantry setup. Since we are operating within the dimensional limits of an extruded beam, this bearing mounting allows us to tune in one axis perfectly, so in this case, the customer needed dead straight in Y axis (along this beam), and the Z axis then is limited, but still, amazingly within .002". Sealed encoders are used as this is a laser cutting gantry.
Next time, I think we will pitch the customer on Renishaw magnetic encoders. It will be far less expensive than the Heidenhain sealed glass scales, which were selected solely for the environment.
ServoNut Lowboy Granite Base CNC

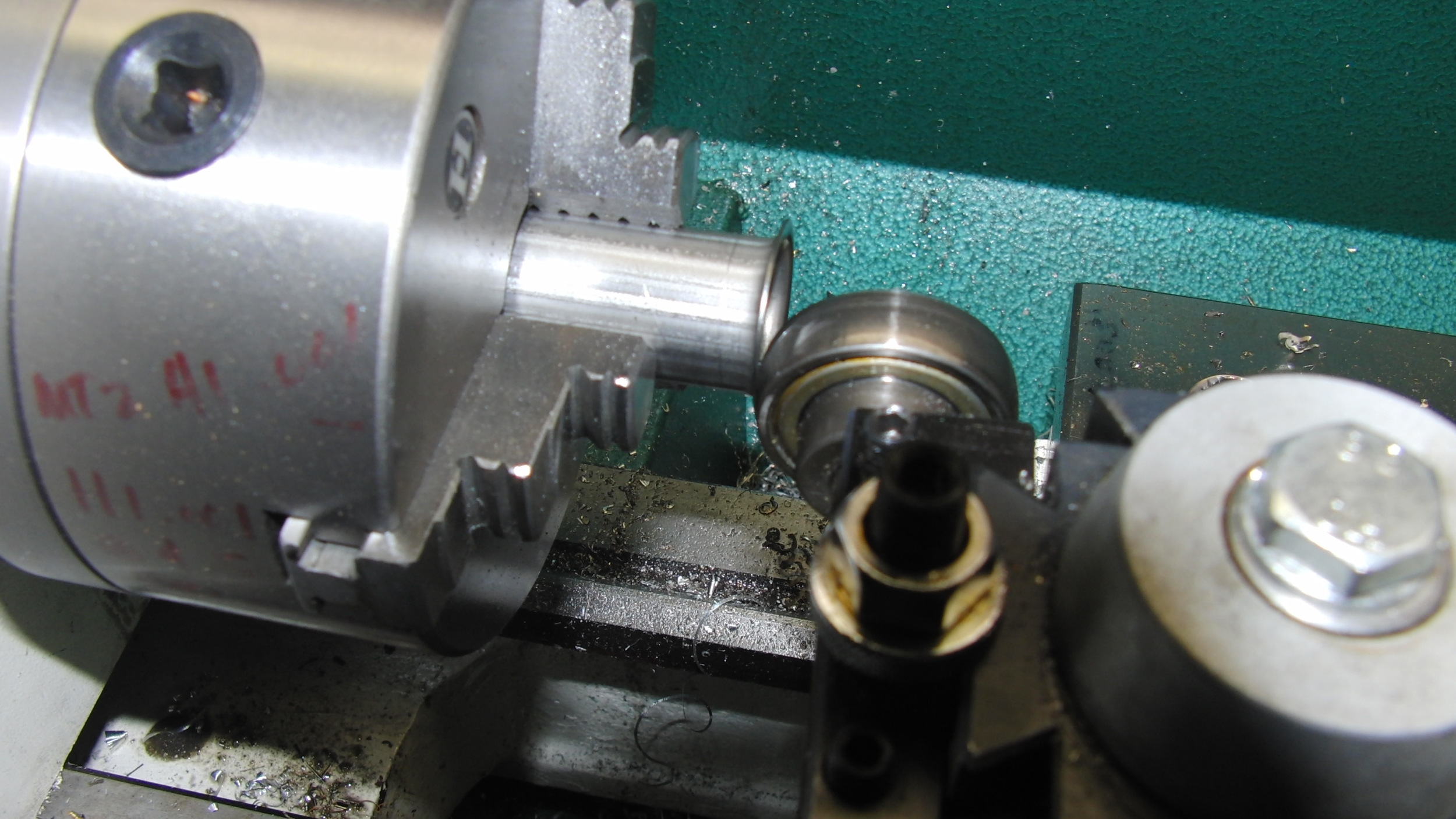
My new lathe/mill
It was a childhood dream of mine to have the mythical German U-boat multi-tool that could make anything. Well, this one's a passable Chinese. It's 7 years old with little use, and is far better than reviews I've read of more recent ones. I had to sell my other lathe to make room for it which went to a friend.
I've taken it all apart for cleaning and lube, and I've now made my first mill cut at home! Loving it. Nice dovetail ways on it with a good amount of surface area. The mill is a bit anemic; I might throw a dedicated 1 hp motor up there, but for now, it's got everything I need in my little space. Just need a decent vise for milling and a quick change tool holder for the lathe.
It's got the old school tool holder that makes you shim the cutters to height, so I'm going to make some brass wedges to make that a breeze.
I was going to buy a bunch of tooling for it, but now think I'll make it an NC, since I have most of the stuff; motors, amps and a DeskCNC card. I'll see how it goes. If that one is no good, I've got a few others to try.
At the office, the NC choice is Extratech. I've got a ServoBelt gantry with that control going on soon, but need a Z axis for the spindle, which I may just make at home as as warm-up for the CNC conversion here.
Cool!
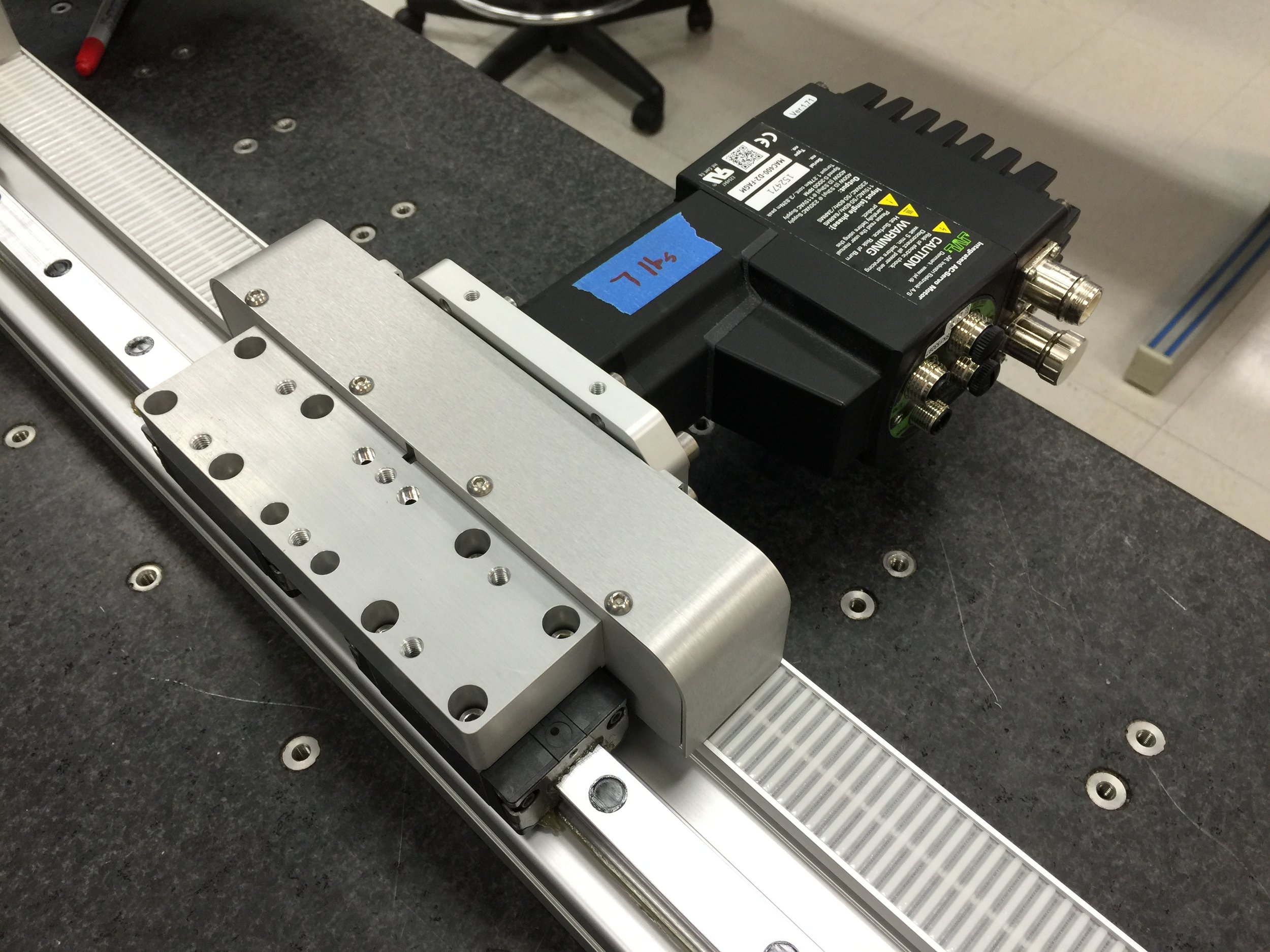
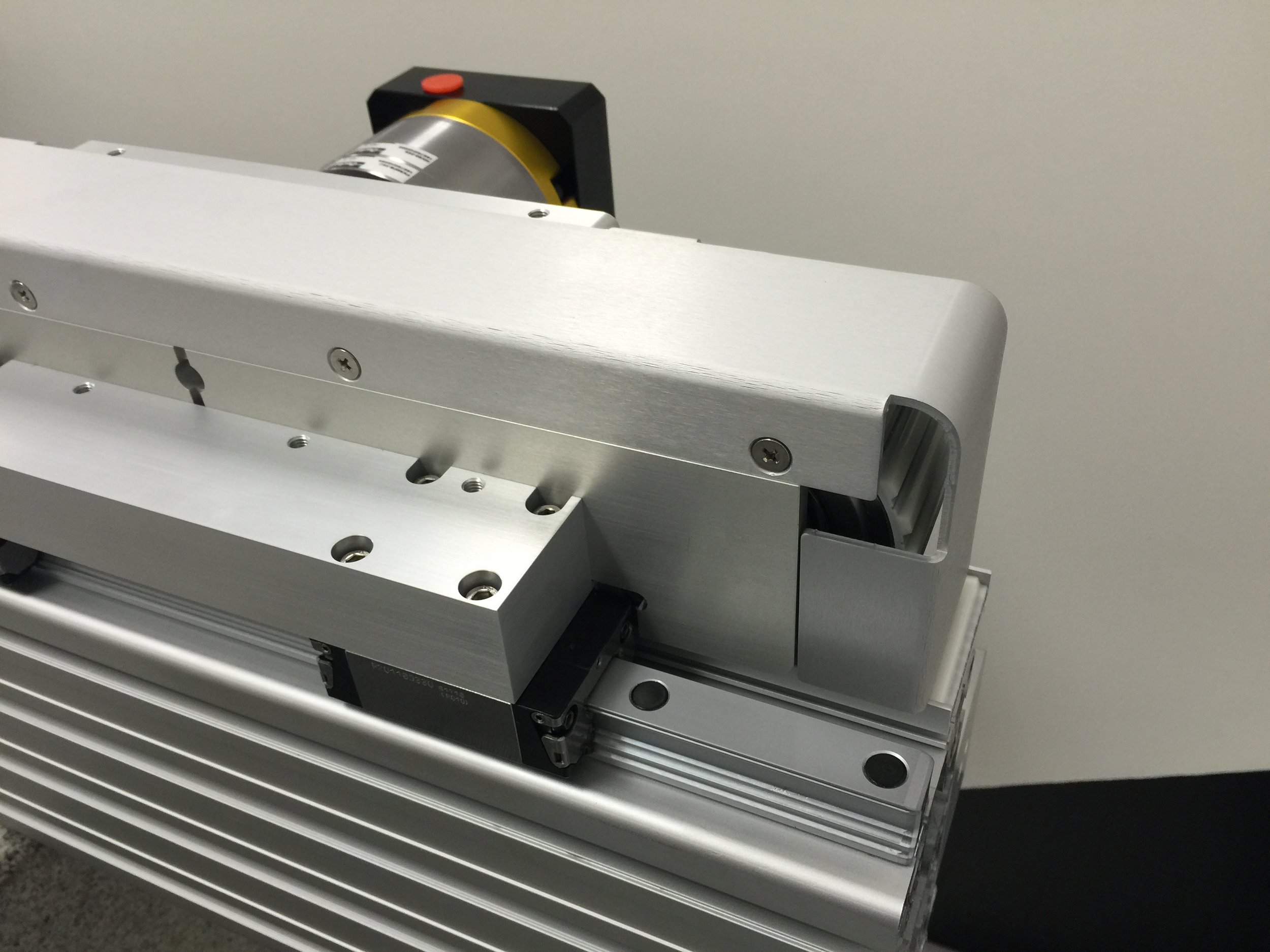
Stupid high inertia mismatch test with ServoBelt
This is a ServoBelt test where the inertia mismatch between payload and motor was 200:1. For those that may not know, the normal rule of thumb is to keep this mismatch under 20:1 or so. It's a common rule that is no longer relevant with the advent of high resolution encoders, high servo update rates, and the fine current control of modern amps. The Teknic amp that is driving this brings some special additional mojo to it, too.
Upshot is that this move is settling in position within 2 encoder counts in 30msec with the smallest motor we'll put on these things. Hatcha cha! Cool stuff.
You can't do this with a conventional belt drive. Too springy. At least, not practically. Mode shaping at the control end could do it for a specific move.
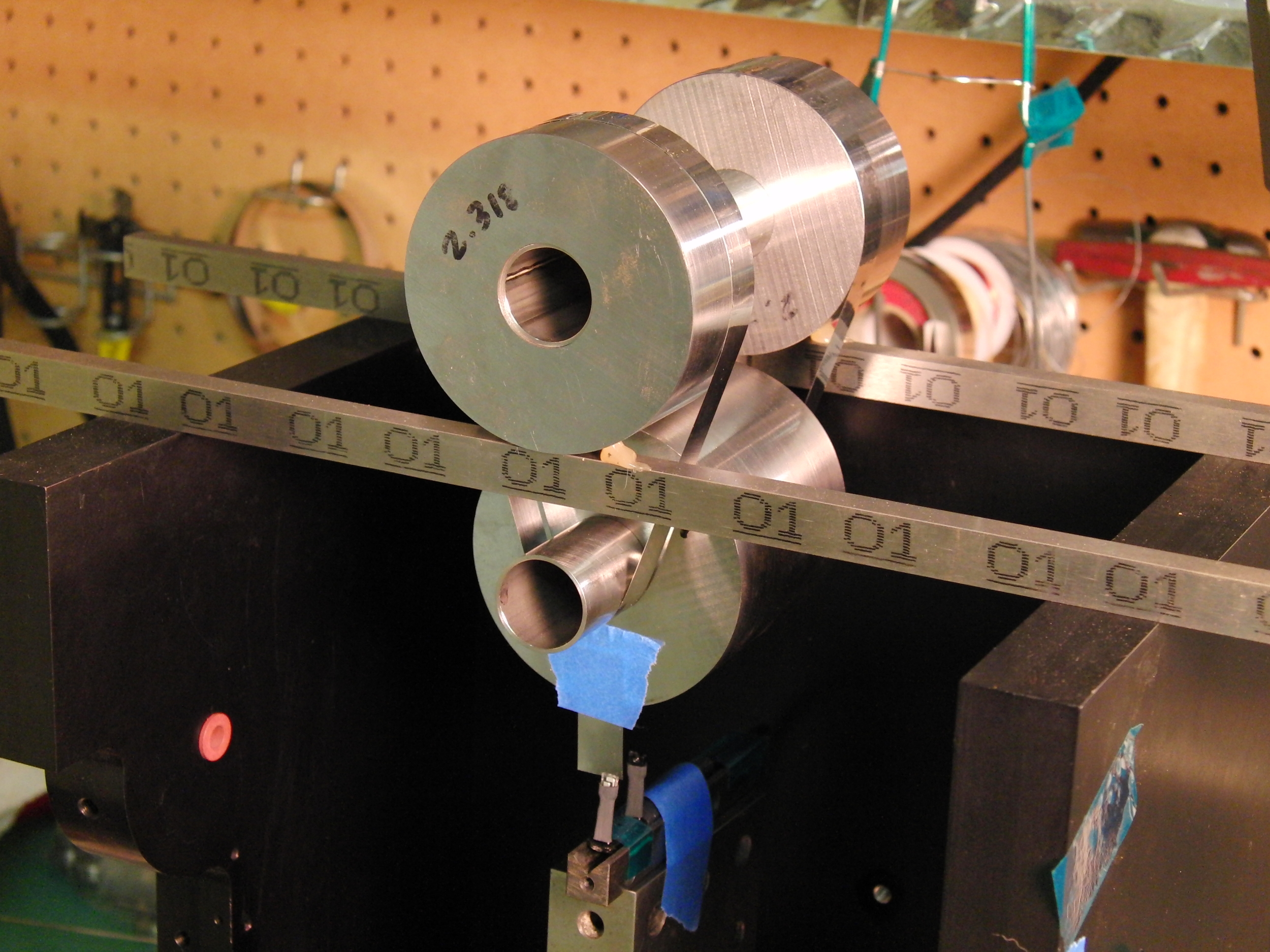
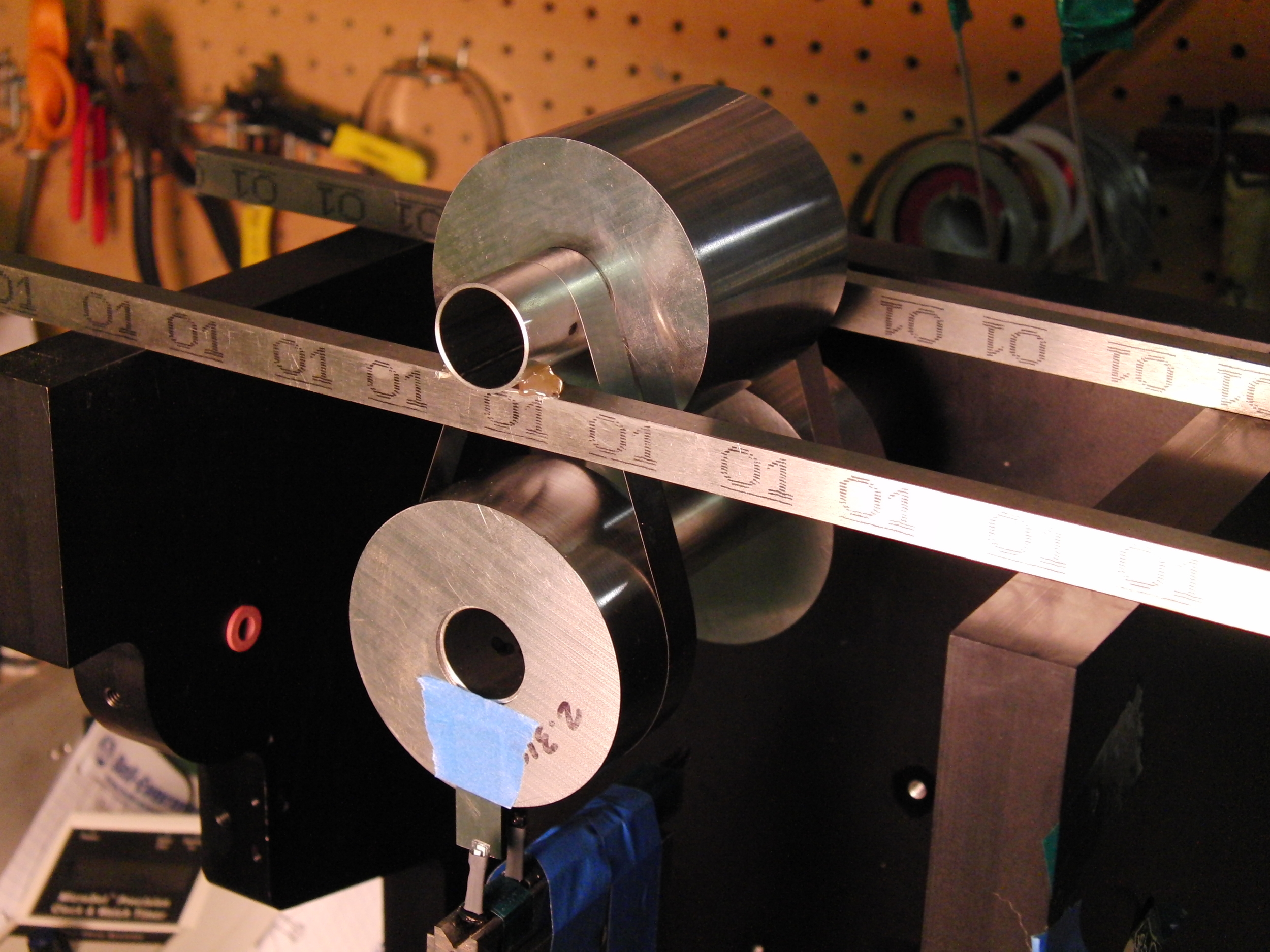
High and Low Inertia Pendulum Bob
This rig has two identical stainless bands for a suspension. It is like a belt speed reducer, with the bands running from large diameter at one end to small at the other. The two bobs are less than .0002" different in diameter and their faces are parallel to the same degree by kiss grinding. The thicknesses are such that each bob, though one is made of two disks on the ends of a tube and one a single piece in the middle of an equivalent tube, are the same weight, that is to less than .001 lb. which is the resolution of my scale.
This can be set up for two cases, one where the bob's apparent moment of inertia (about it's center) is roughly ten times what it would be if rigidly attached to a rod, if there were one. In the other, with the small suspension diameter above, the local inertia is one-tenth of rigidly attached.
What it does is allow me to verify my math model of variable inertia bobs. One interesting aspect of it is the high inertia case can be shorter than a normal pendulum for the same frequency. I'd say another neat thing is that it follows a perfectly circular path, until one considers centrifugal deflection of the bands, but that would I'm sure fail as a theory on close inspection. I predict that it will be no more determinate than a knife-edge, but maybe more than a conventional band suspension, where bend radii are not enforced.
I've just gotten the flexure bands made, and have not made the support clamps yet. There's no meaningful data to be gotten yet, since, as much as I love my hot glue gun, it fails as a rigid mount. Look closely at the high inertia case and you can see the upper hardware moving. Bad show, that!
Elliptical path pendulum
A slow mo of the elliptical pendulum. Next up is a longer period for the same length, bwa ha ha.
Battering ram pendulum
This is part of an on-going design of an all mechanical clock from first principles. The battering ram type will be important later, I think. The main feature of it is that it's local moment of inertia is irrelevant, so if it changes with temperature, it does not change the period of the pendulum.
My Pulse-Jet Work
If you are interested in more detail about my pulsejet work over the last couple of years, check it here:
http://www.pulse-jets.com/phpbb3/viewtopic.php?f=3&t=4595&st=0&sk=t&sd=d&hilit=build+log&start=240#p53553
ServoBelt Rocks the CEV
A ServoBelt actuator is being used to rock a quarter scale model of the Crew Excursion Vehicle (CEV), the replacement for the space shuttle. Basically, the model goes in the biiiiig pool at NASA Johnson Space Center, and they can rock the lander as if in high seas. I think they can actually flip it over. I hope to get the follow-on work for the full size unit, though I don't think I'll be getting in it, burp..
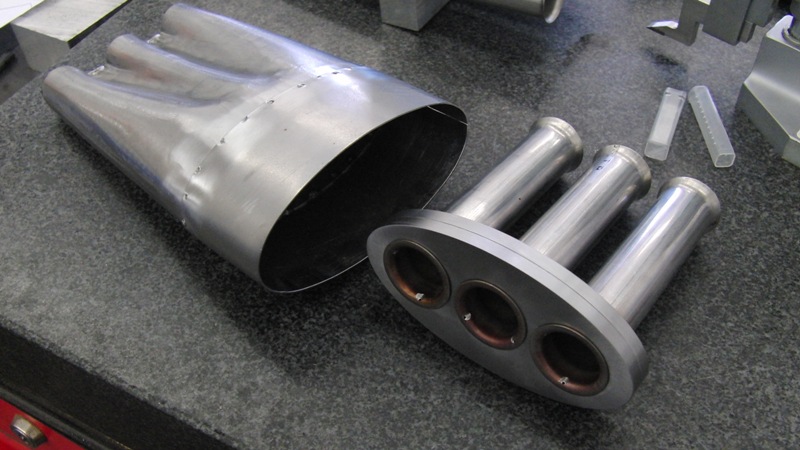
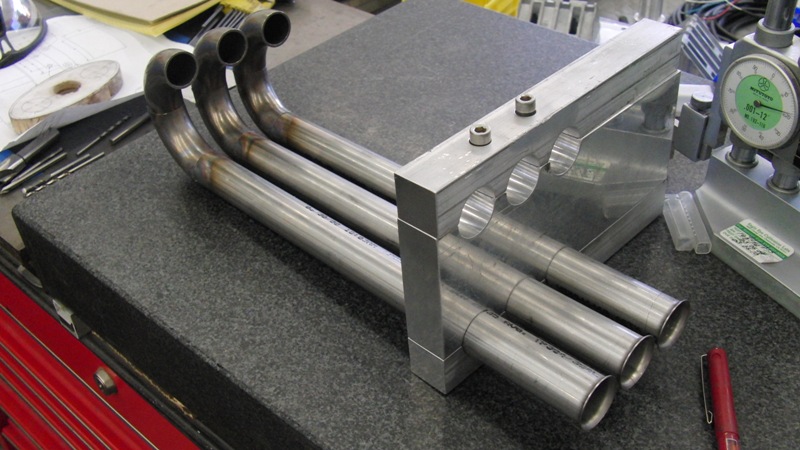
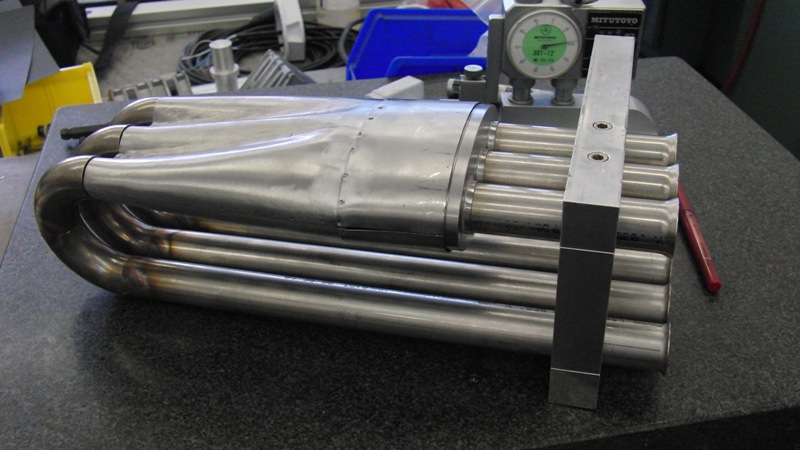
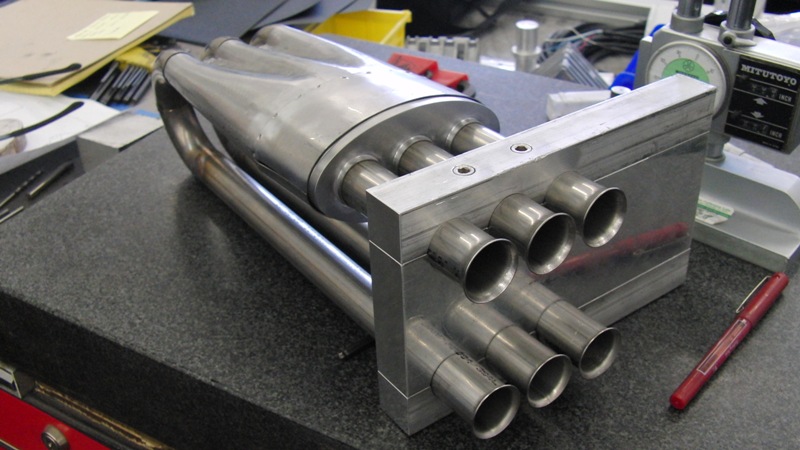
Triple Pipe Pulse-Jet
A very successful adaptation of my "Pocket Jet 2" geometry into a triple pipe pulse jet. Volumes were triple and all lengths were the same as its single parent, but thrust was sqrt3 of instead of the 3x expected. Faaaaascinating... I've been meaning to make a double and see if the thrust is sqrt2 instead of 2x. Big case for having separate ducts instead of melding them into a single combustor. This one split open at a UK meet that I put together.

























Good long travel ServoBelt video
Cool one. This is a 22 foot long dual carriage stage. The same customer got a 90 foot dual gantry!
Clock article published Dec. '09
Here is an article I wrote that was published in the Horological Science Newsletter. I'm currently writing the follow-on article, and the belt pendulum below is part of that effort.

Some new ServoBelt stuff
A cool rendering just done for our new ServoBelt brochure, and a video of our Z axis counterbalance tests.
Steel belt pendulum test
Belt pendulum test with various ratios. This is one of a few ways to make a pendulum that is analytically a point mass.
Interesting ServoBelt test
Just tested a ServoBelt Gantry set up with a 20 nanometer grid encoder. Making .062" circles in 250 milliseconds and following the proper path within .001". Very cool.