Just a quick post to show what I've been working on. First, inspiration came last year from here:
http://reprap.org/wiki/Rostock
A parallel robot; a "linear delta" configuration. I'd studied this and designed several variants back in '97 on my way to creating the KAOS robot. I was fascinated with the parallel robots, but the controls were going to be difficult to a level I wasn't prepared for at the time.
A few years later, I realized I'd be able to lean on my new friends at Delta Tau to create a control kinematic for anything I could come up with, but in KAOS, I was after something different: linear behavior, and integer relationships between differentially moving carriages, and servo tuning consistency no matter where you are in the addressable volume. Parallel robots are none of that, but let's just revel in the beauty of them anyway.
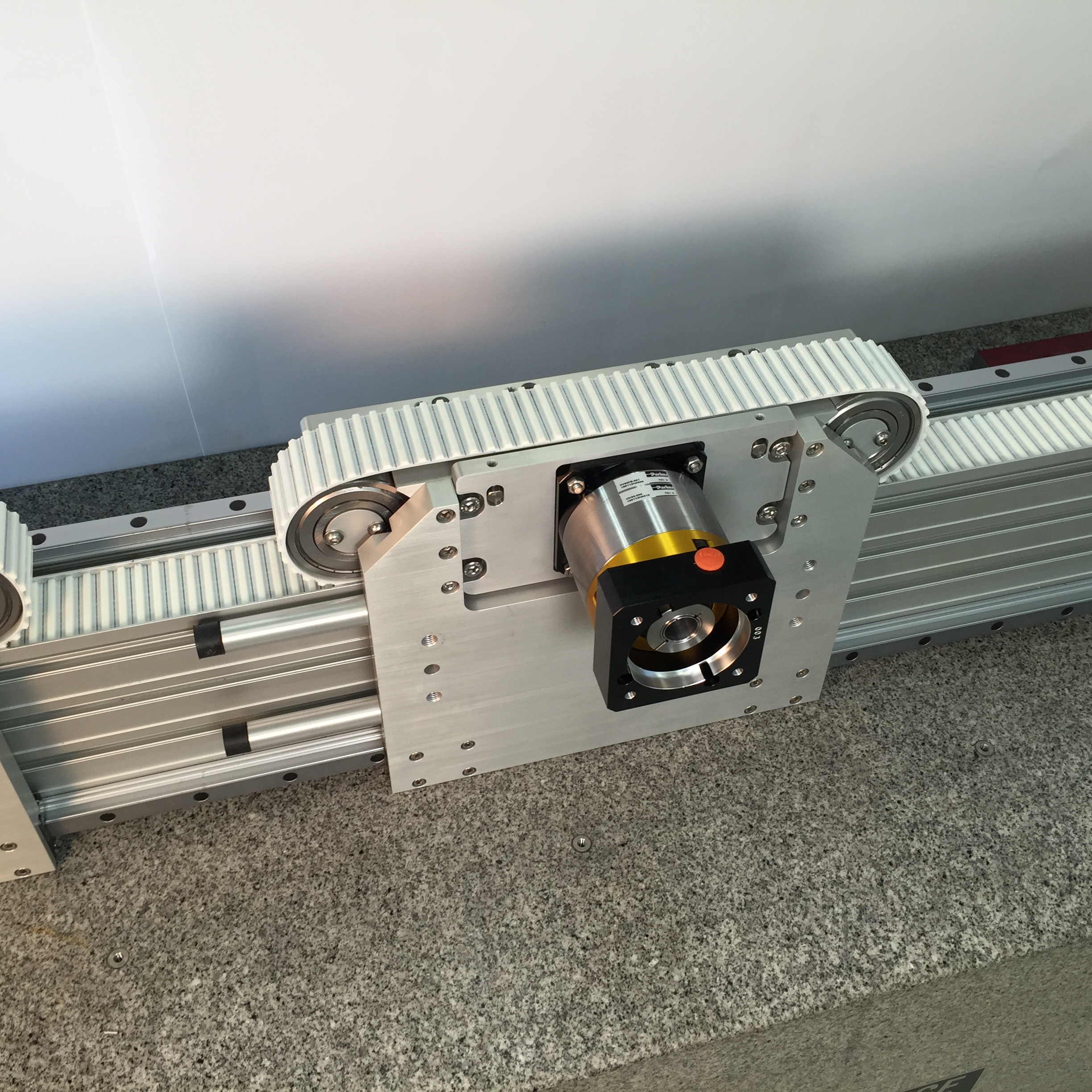
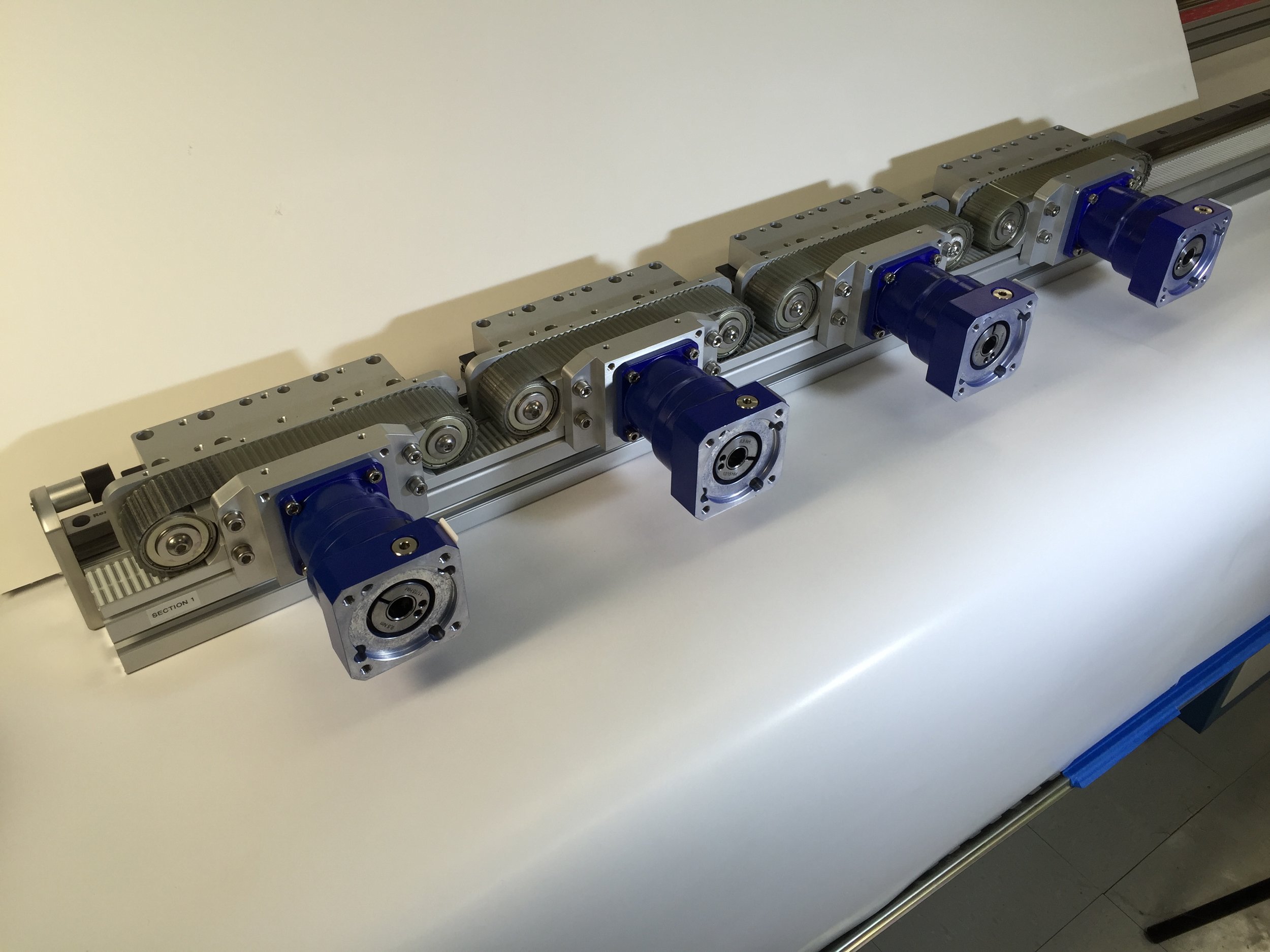
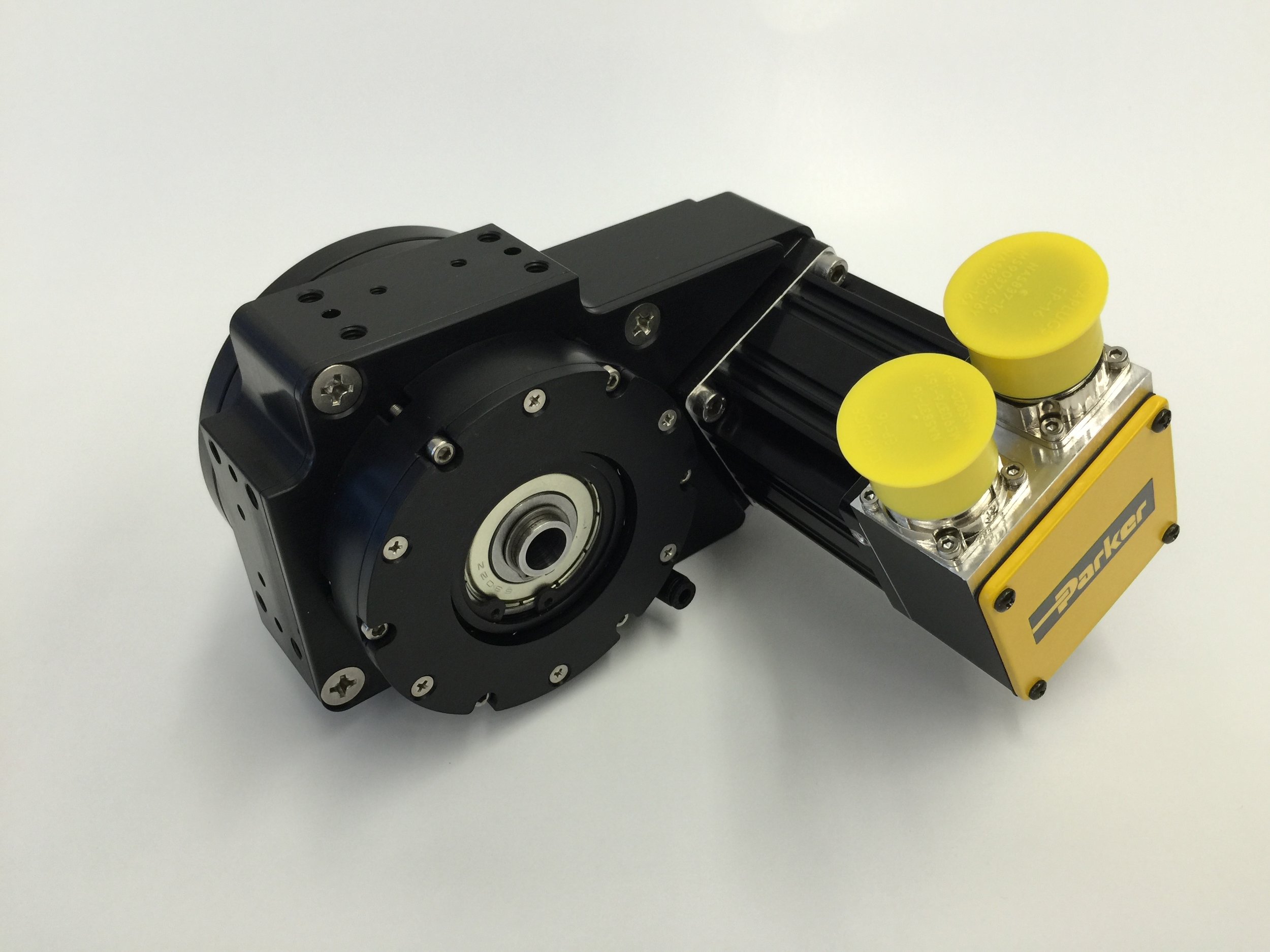
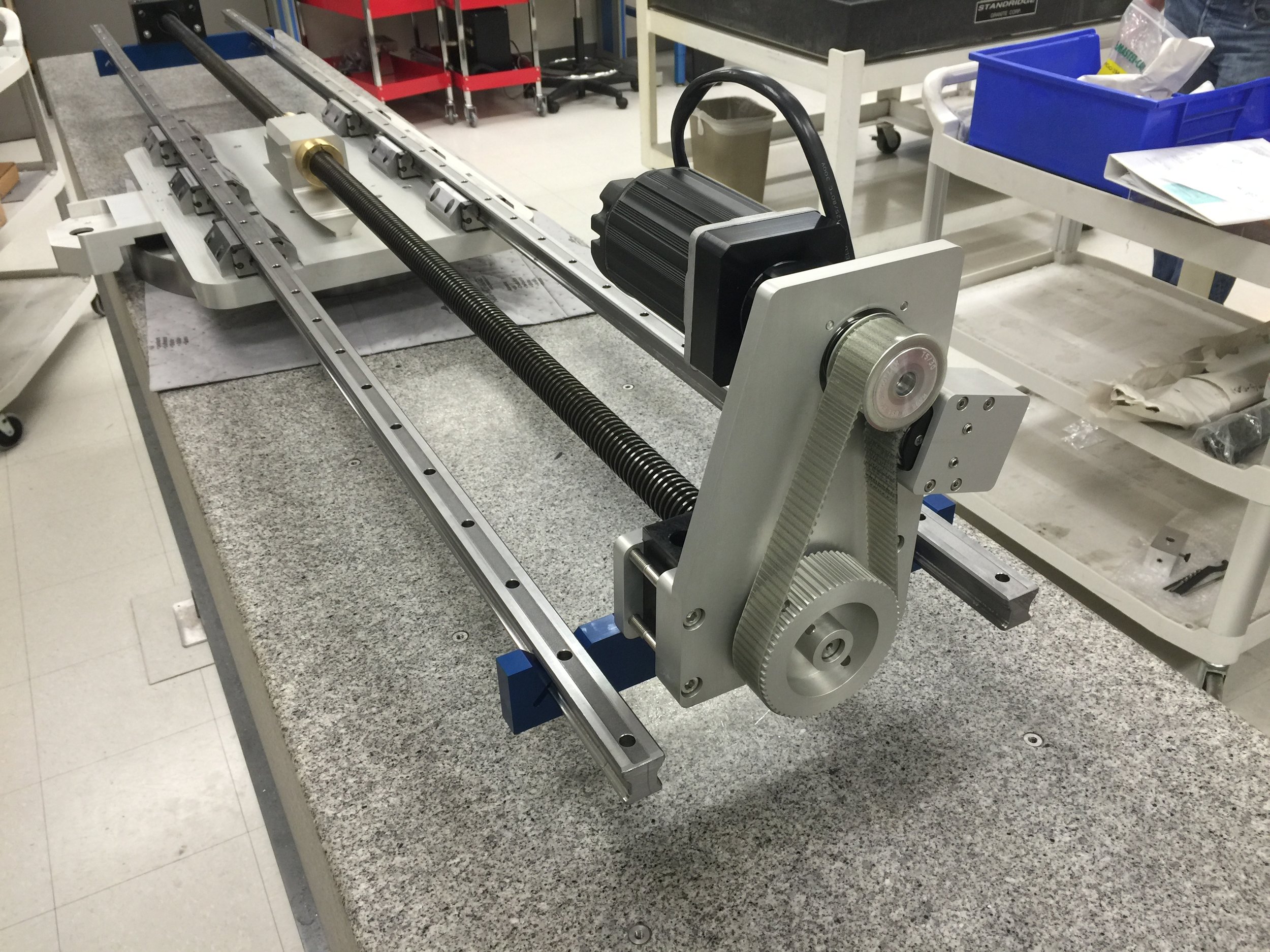
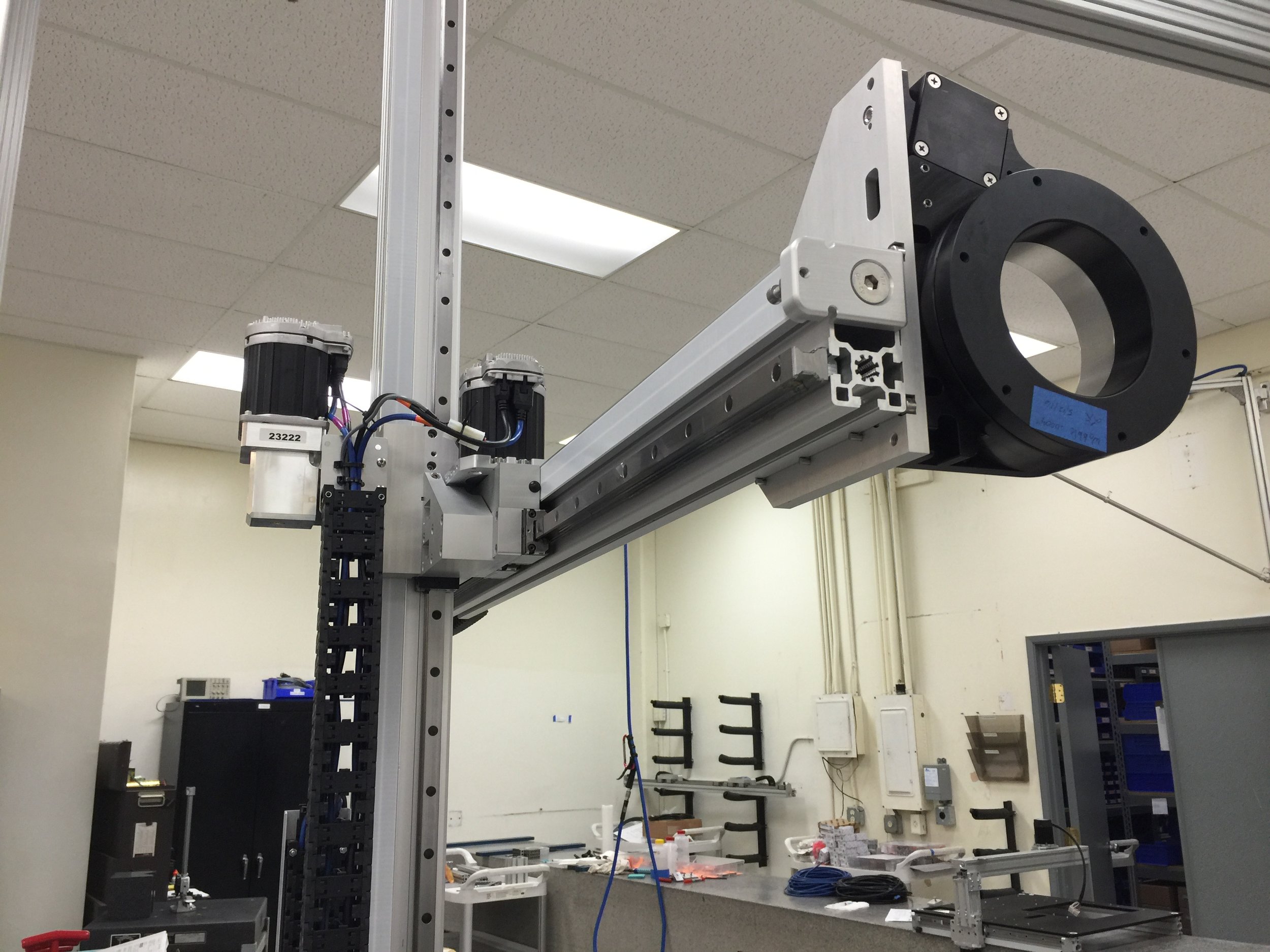
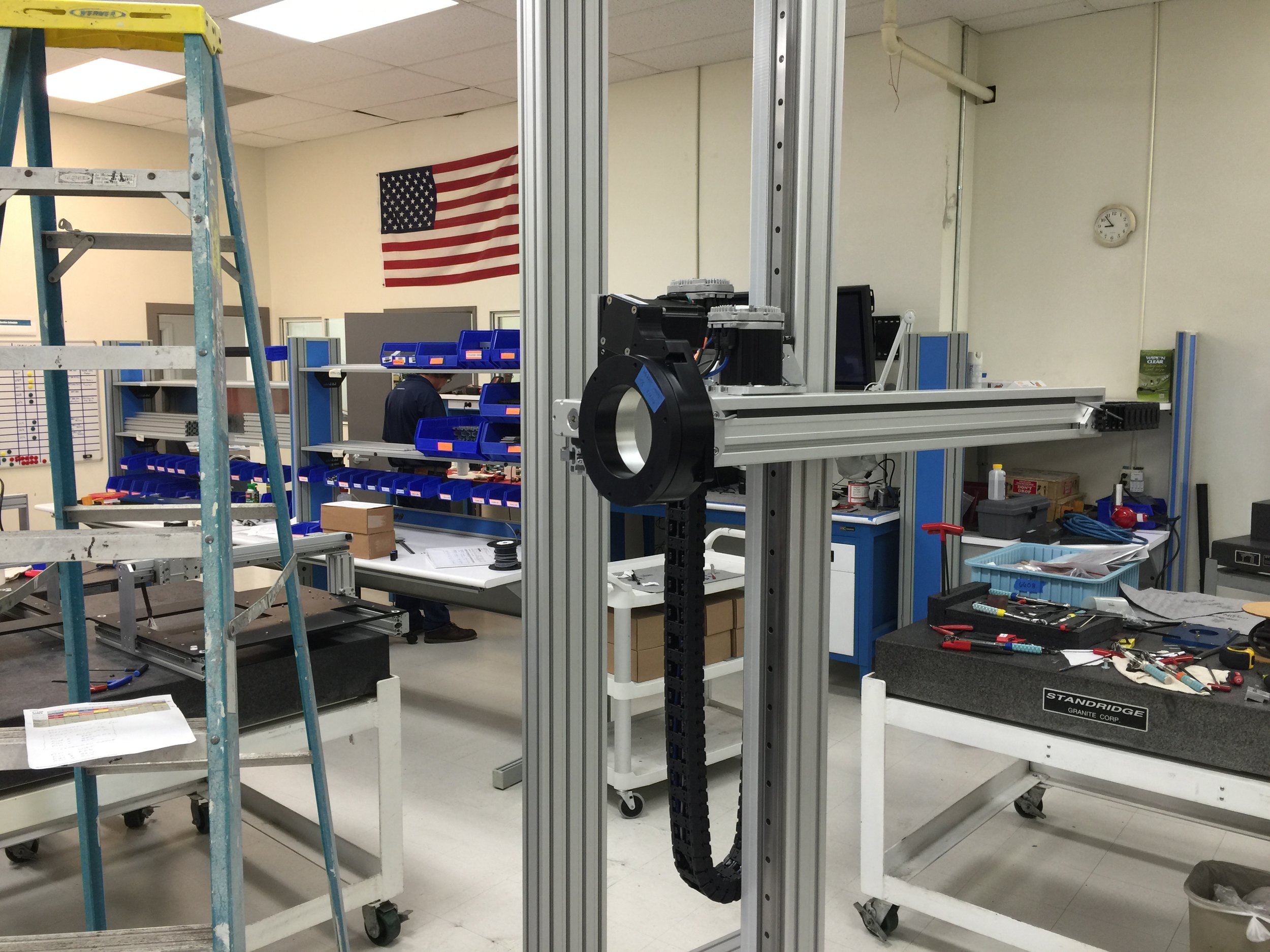
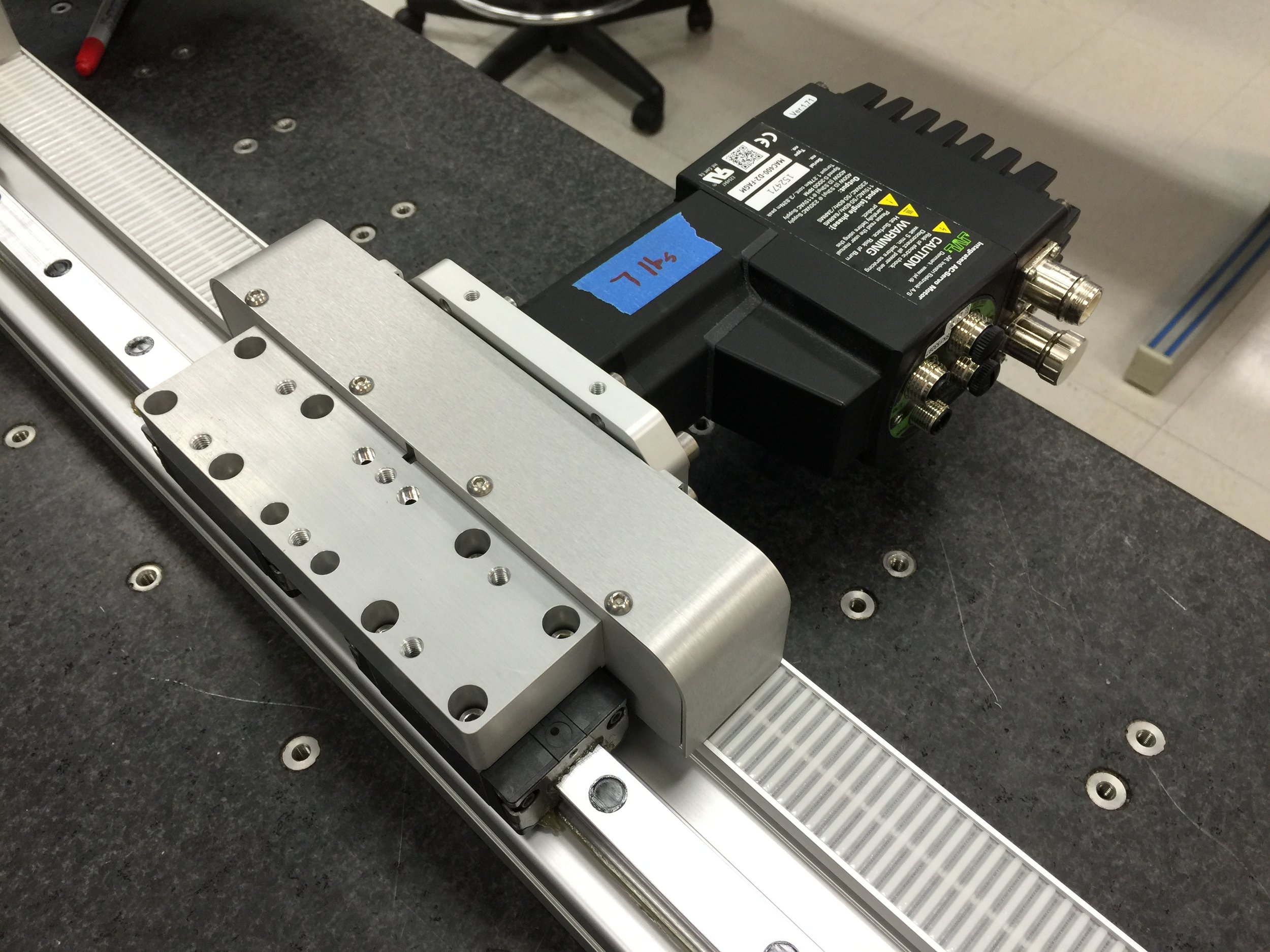
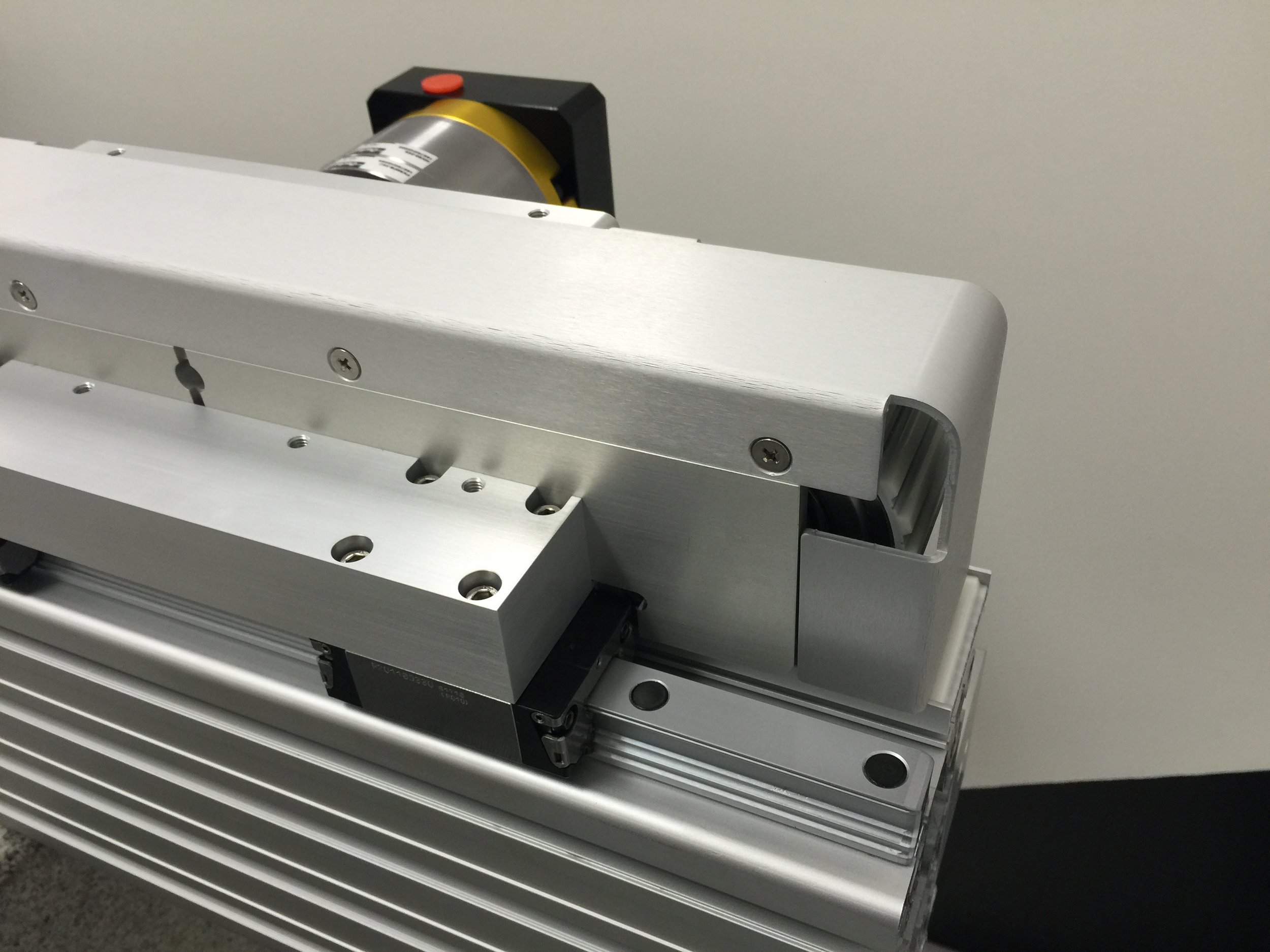
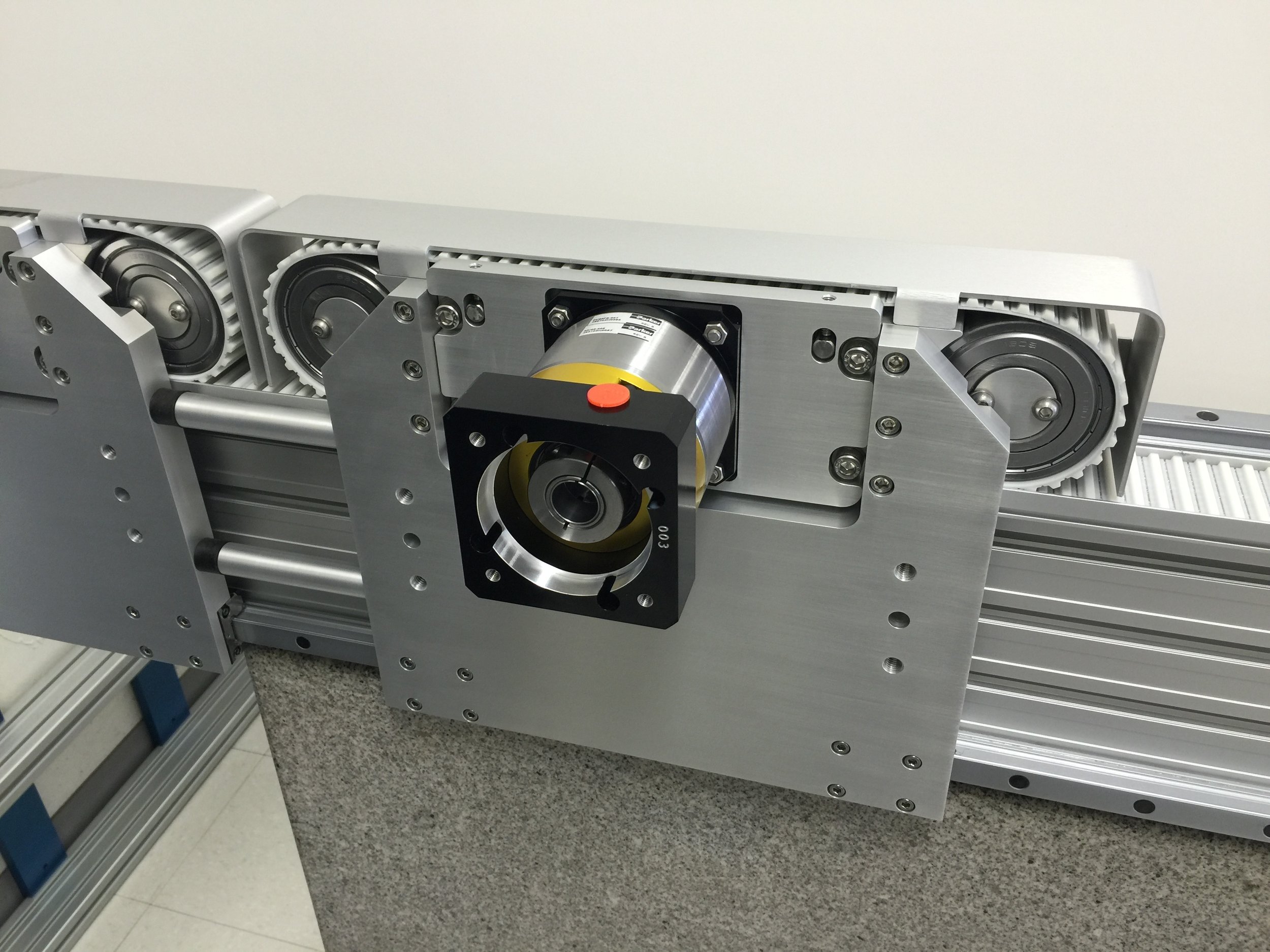
Once a design is done, the amazing prototyping capability of 3d printing takes over, and hardware becomes real!